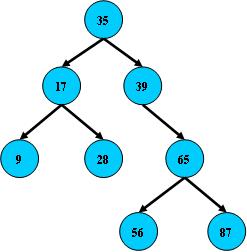
二叉排序树或者是一棵空树,或者是具有下列性质的二叉树: (1)若左子树不空,则左子树上所有结点的值均小于它的根结点的值; (2)若右子树不空,则右子树上所有结点的值均大于它的根结点的值; (3)左、右子树也分别为二叉排序树; (4)没有键值相等的节点(因此,插入的时候一定是叶子节点)。 插入有序节点,退化成单支树 1.查找效率最好O(logn),最坏O(n) 2.插入效率和查找效率相同(只插入叶子节点) 3.删除效率最好O(logn)+O(1)-只有左子树或者右子树 最差O(logn)+O(logn)-左子树和右子树同时存在
若*p结点为叶子结点,即PL(左子树)和PR(右子树)均为空树。由于删去叶子结点不破坏整棵树的结构,则可以直接删除此子结点。
若*p结点只有左子树PL或右子树PR,此时只要令PL或PR直接成为其双亲结点*f的左子树(当*p是左子树)或右子树(当*p是右子树)即可,作此修改也不破坏二叉排序树的特性。
若*p结点的左子树和右子树均不空。在删去*p之后,为保持其它元素之间的相对位置不变,可按中序遍历保持有序进行调整,可以有两种做法:
其一是令*p的左子树为*f的左/右(依*p是*f的左子树还是右子树而定)子树,*s为*p左子树的最右下的结点,而*p的右子树为*s的右子树;
其二是令*p的直接前驱(或直接后继)替代*p,然后再从二叉排序树中删去它的直接前驱(或直接后继)-即让*f的左子树(如果有的话)成为*p左子树的最左下结点(如果有的话),再让*f成为*p的左右结点的父结点。
平衡二叉搜索树:它是一棵空树或它的左右两个子树的高度差的绝对值不超过1,并且左右两个子树都是一棵平衡二叉树。常用算法有红黑树、AVL、Treap、伸展树等。在平衡二叉搜索树中,我们可以看到,其高度一般都良好地维持在O(log2n),大大降低了操作的时间复杂度。
当在二叉排序树中插入一个节点时,首先检查是否因插入而破坏了平衡,若破坏,则找出其中的最小不平衡二叉树,在保持二叉排序树特性的情况下,调整最小不平衡子树中节点之间的关系,以达到新的平衡。
所谓最小不平衡子树,指离插入节点最近且以平衡因子的绝对值大于1的节点作为根的子树。
1. 若左子树高LH,查看其左子树根节点的信息,若是LH,则一次右旋;若是RH,则一次左旋+一次右旋
2. 若右子树高RH,查看右子树根节点的信息,若是RH,则一次左旋;若是LH,则一次右旋+一次左旋
红黑树和AVL树类似,都是在进行插入和删除操作时通过特定操作保持二叉查找树的平衡,从而获得较高的查找性能。
二叉平衡树的严格平衡策略以牺牲建立查找结构(插入,删除操作)的代价,换来了稳定的O(logN) 的查找时间复杂度
它虽然是复杂的,但它的最坏情况运行时间也是非常良好的,并且在实践中是高效的: 它可以在O(log n)时间内做查找,插入和删除,这里的n 是树中元素的数目。
(1) 查找代价:由于红黑树的性质(最长路径长度不超过最短路径长度的2倍),可以说明红黑树虽然不像AVL一样是严格平衡的,但平衡性能还是要比BST要好。其查找代价基本维持在O(logN)左右,但在最差情况下(最长路径是最短路径的2倍少1),比AVL要略逊色一点。
(2) 插入代价:RBT插入结点时,需要旋转操作和变色操作。但由于只需要保证RBT基本平衡就可以了。因此插入结点最多只需要2次旋转,这一点和AVL的插入操作一样。虽然变色操作需要O(logN),但是变色操作十分简单,代价很小。
(3) 删除代价:RBT的删除操作代价要比AVL要好的多,删除一个结点最多只需要3次旋转操作。
RBT 效率总结 : 查找 效率最好情况下时间复杂度为O(logN),但在最坏情况下比AVL要差一些,但也远远好于BST。