行为树(Behavior Tree)实践(1) 基本概念(2)
发布时间:2019-10-22 发布者:文案编辑 来源:原创/投稿/转载
如果我们继续考察选择节点,会产生一个问题,如何从子节点中选择呢?选择的依据是什么呢?这里就要引入另一个概念,一般称之为前提(Precondition),每一个节点,不管是行为节点还是控制节点,都会包含一个前提的部分,如下图
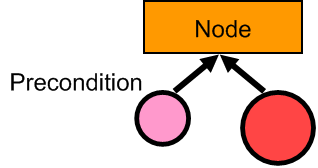
前提就提供了“选择”的依据,它包含了进入,或者说选择这个节点的条件,当我们用到选择节点的时候,它就是去依次测试每一个子节点的前提,如果满足,则选择此节点。由于我们最终返回的是某个行为节点(叶节点),所以,当前行为的“总”前提就可以看成是:
当前行为节点的前提And父节点的前提And父节点的父节点的前提And.And根节点的前提(一般是不设,直接返回True)
行为树就是通过行为节点,控制节点,以及每个节点上的前提,把整个AI的决策逻辑描述了出来,对于每次的Tick,可以用如下的流程来描述:
从概念上来说,行为树还是比较简单的,但对AI程序员来说,却是充满了吸引力,它的一些特性,比如可视化的决策逻辑,可复用的控制节点,逻辑和实现的低耦合等,较之传统的状态机,都是可以大大帮助我们迅速而便捷的组织我们的行为决策。希望这次简单的介绍,对大家有所帮助,能力有限,不一定能表述的很清楚,有问题,或者有指教的,都请和我多多交流,最后,我对这个士兵的巡逻分支画了一个示意图,供大家参考:
上一篇:y 与ü相拼的教后反思
下一篇:湖北省人民检察院